Particle Filtering for Nonlinear Systems: Proposals and Scalability
Presenter
November 19, 2013
Keywords:
- Filtering
MSC:
- 93E11
Abstract
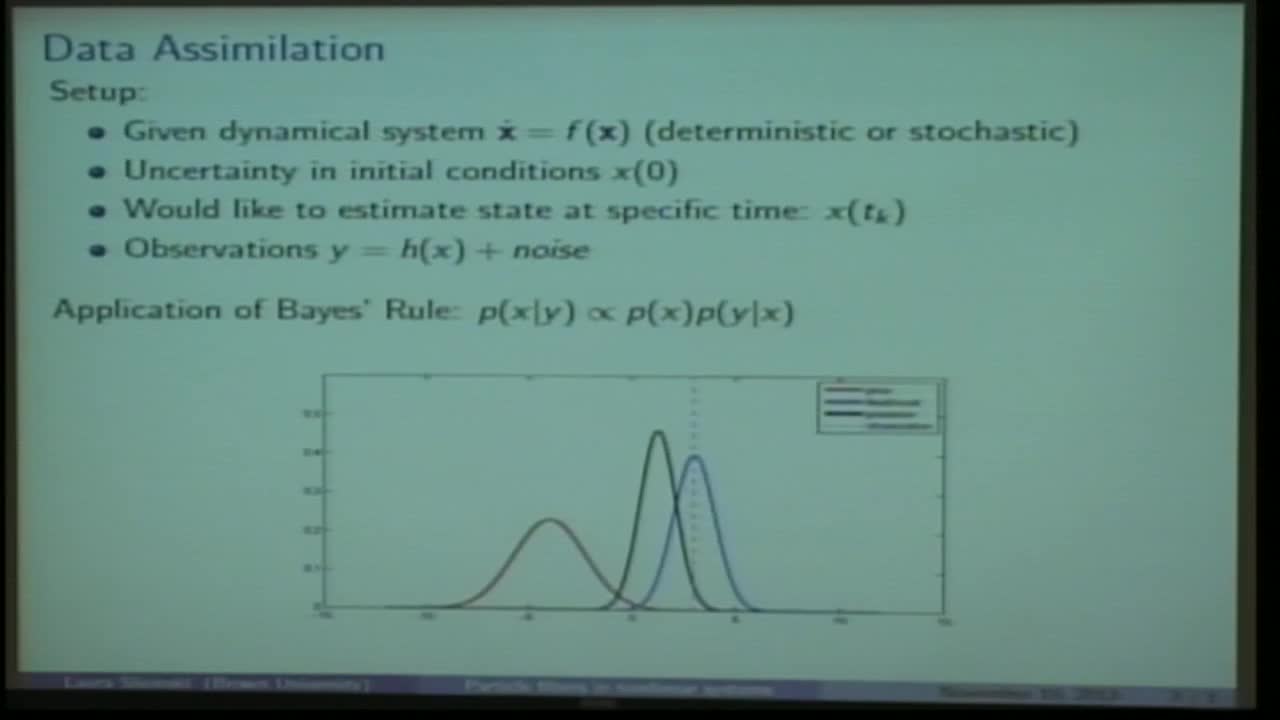
Particle filters were developed as an ensemble data assimilation method that, unlike many traditional methods, could approximate non-Gaussian probability distributions well. Unfortunately, the number of particles needed for this method scales exponentially with the size of the problem, and thus may not be feasible for large-scale problems. In this talk I will review previous results which show how filter collapse is related to the size of the problem in linear systems. I will then discuss new results which numerically show that similar results hold in the nonlinear case, and discuss some complications that arise when we switch from the linear to the nonlinear regime. Finally, I will discuss some encouraging results regarding the optimal proposal vs the standard proposal distributions.